
TL;DR:
- PTv3 is a groundbreaking advancement in point cloud processing, focusing on simplicity and efficiency.
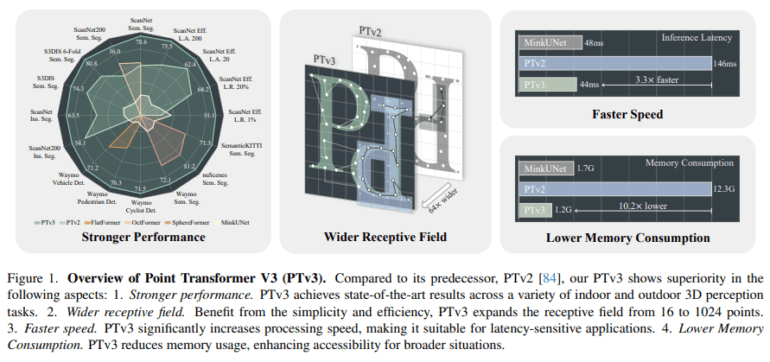
- It achieves significant performance improvements through the power of scale, expanding its receptive field.
- PTv3 adopts a serialization-based approach and multi-dataset synergistic learning inspired by Point Prompt Training.
- It replaces traditional neighbor search with serialized mapping, enhancing scalability without sacrificing accuracy.
- PTv3 outperforms previous models across 20 tasks in indoor and outdoor scenarios, highlighting its effectiveness.
- The model prioritizes Layer Normalization over Batch Normalization for stability with varying batch sizes or memory constraints.
- Mean class-wise intersection over union is the primary metric for indoor semantic segmentation.
- PTv3 boasts a threefold increase in processing speed and a tenfold improvement in memory efficiency compared to PTv2.
Main AI News:
In the midst of the digital transformation era, a three-dimensional revolution is sweeping across industries, leaving an indelible mark on precision and depth. At the heart of this transformative wave is point cloud processing—a groundbreaking method that meticulously captures the intricacies of our physical world in a digital realm. Whether it’s autonomous vehicles navigating intricate terrains or architects crafting visionary structures, point cloud processing has emerged as the linchpin for converting raw spatial data into actionable insights. It’s opening new vistas in domains as diverse as robotics, urban planning, and virtual reality.
Enter Point Transformer V3 (PTv3), a remarkable breakthrough in point cloud processing was introduced by a consortium of esteemed institutions, including HKU, SH AI Lab, MPI, PKU, and MIT. PTv3 stands apart by prioritizing simplicity and efficiency, outshining its predecessors by resolving the age-old dilemma of accuracy versus efficiency. Through the sheer power of scale, PTv3 has notched up significant performance gains, effectively broadening its receptive field.
The realm of deep neural architectures for 3D point cloud data can be categorized into three domains: projection-based, voxel-based, and point-based approaches. PTv3, rooted in serialization-based techniques, delves into the realm of point cloud serialization. While most 3D representation learning traditionally involves laborious training from scratch, PTv3, influenced by Point Prompt Training, embraces a multi-dataset synergistic learning paradigm. It places a premium on efficiency, prioritizing aspects that matter most and harnessing the potential of scale to enhance performance. This serves as a testament to the ongoing evolution of transformer-based architectures for point cloud processing.
In the sphere of 3D backbone development, limitations in the scale and diversity of point cloud data have often resulted in a precarious balance between accuracy and speed. PTv3, however, addresses this issue head-on by championing simplicity and efficiency without compromising on accuracy. It ushers in a paradigm shift by replacing conventional K-Nearest Neighbors with serialized neighborhoods, effectively expanding its receptive field. By accentuating the significance of scalability in backbone design, PTv3 emerges as a frontrunner, boasting state-of-the-art performance across 20 distinct tasks in both indoor and outdoor settings. This is a testament to its prowess in resolving the age-old trade-offs that have plagued 3D backbone models built on transformer architecture.
PTv3’s innovative approach to point cloud processing hinges on the unwavering commitment to simplicity and efficiency. It eschews the intricate neighbor search in favor of serialized mapping, enabling remarkable scaling while retaining efficiency. Layer Normalization takes precedence over Batch Normalization, ensuring stability even with varying batch sizes or memory constraints. Mean class-wise intersection over union serves as the primary metric for indoor semantic segmentation, and PTv3’s model configurations provide invaluable insights into serialization-based point cloud transformers.
Notably, PTv3 shines across a spectrum of more than 20 tasks, encompassing both indoor and outdoor scenarios, with a striking emphasis on simplicity and efficiency. It achieves a remarkable threefold increase in processing speed and a tenfold enhancement in memory efficiency compared to its predecessor, PTv2. The transformation is achieved by replacing precise neighbor search with serialized mapping, unlocking significant scalability and expanding the receptive field. PTv3 underscores the pivotal role of scale in performance enhancement, showcasing how it’s effectively harnessed. Detailed data augmentation configurations significantly contribute to its heightened performance, marking a new era in point cloud processing.
Conclusion:
Point Transformer V3 (PTv3) represents a significant leap in the efficiency of point cloud processing. Its emphasis on simplicity, scalability, and enhanced performance across a range of tasks positions it as a game-changer in industries reliant on 3D data processing. PTv3’s ability to tackle the accuracy-efficiency trade-offs will likely drive innovation and adoption in fields such as robotics, urban planning, and virtual reality, ultimately shaping the future of the market.