
TL;DR:
- A team of researchers has developed a groundbreaking method for controlling lower limb exoskeletons using deep reinforcement learning.
- Their approach enables more robust and natural walking control, enhancing the user experience with lower limb exoskeletons.
- Current control methods for exoskeletons often fall short in providing intuitive movements, compromising balance and causing user fatigue.
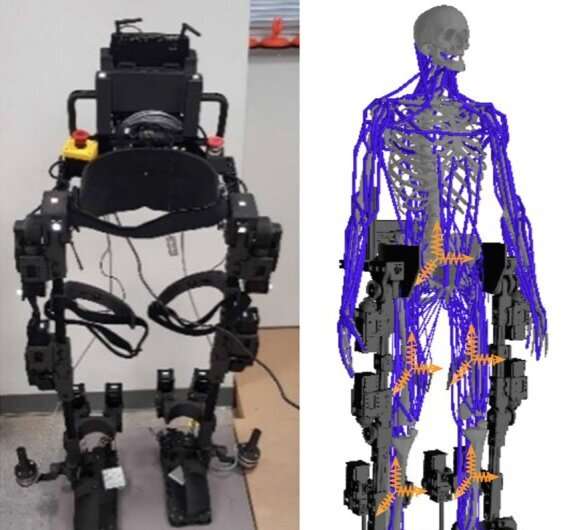
- The proposed method utilizes a combination of a musculoskeletal model and an exoskeleton, training the system to achieve natural walking patterns through reinforcement learning.
- The system shows promising results in terms of improved walking stability and reduced user fatigue.
- The model generates a universal, robust walking controller that can adapt to different levels of human-exoskeleton interactions without manual parameter adjustments.
- This innovation has the potential to benefit a wide range of users, including those with spinal cord injuries, multiple sclerosis, stroke, and other neurological conditions.
- Further testing and refinement of the control algorithms will be conducted to enhance walking performance.
Main AI News:
In a groundbreaking development, a team of researchers introduced a cutting-edge method for controlling lower limb exoskeletons using deep reinforcement learning. Their revolutionary approach, outlined in the esteemed Journal of NeuroEngineering and Rehabilitation under the title “Robust Walking Control of a Lower Limb Rehabilitation Exoskeleton Coupled with a Musculoskeletal Model via Deep Reinforcement Learning,” unlocks the potential for more robust and natural walking control, greatly enhancing the user experience with lower limb exoskeletons.
While wearable robotics have undeniably played a pivotal role in restoring mobility to individuals with lower limb impairments, current control methods for exoskeletons have fallen short in delivering natural and intuitive movements. This limitation compromises balance, leading to user fatigue and discomfort. Regrettably, few studies have dedicated attention to developing robust controllers capable of optimizing the user’s safety and independence.
Ghaith Androwis, Ph.D., a senior research scientist at the Center for Mobility and Rehabilitation Engineering Research at Kessler Foundation and the director of the Center’s Rehabilitation Robotics and Research Laboratory, explains that existing exoskeletons for lower limb rehabilitation rely on an assortment of technologies, including specialized crutches and sensors, to maintain balance. However, these exoskeletons sacrifice independent walking for the sake of added weight and reduced walking speed.
“To develop a lower limb exoskeleton that empowers autonomous and independent walking across diverse conditions, advanced control systems are imperative,” asserts Dr. Androwis. To address this need, the research team devised an innovative method that harnesses the power of deep reinforcement learning to enhance exoskeleton control. Reinforcement learning, a branch of artificial intelligence, allows machines to learn and improve their performance through trial and error, drawing insights from their own experiences.
“By combining a musculoskeletal model with an exoskeleton, we simulated lower limb movements and trained the exoskeleton control system to replicate natural walking patterns through reinforcement learning,” explains Xianlian Zhou, Ph.D., associate professor and director of the BioDynamics Lab in the Department of Biomedical Engineering at the New Jersey Institute of Technology (NJIT). Dr. Zhou adds that the team is currently subjecting the system to real-world conditions using a lower limb exoskeleton developed in-house. Encouragingly, preliminary results showcase enhanced walking stability and reduced user fatigue.
Crucially, the team’s proposed model has yielded a universal, robust walking controller capable of accommodating various degrees of human-exoskeleton interactions without the need for manual parameter adjustments. This novel system exhibits the potential to benefit a wide array of users, including individuals with spinal cord injuries, multiple sclerosis, stroke, and other neurological conditions. Moving forward, the researchers intend to continue testing the system with users and refining the control algorithms to further enhance walking performance.
“We are thrilled about the potential of this new system to enhance the quality of life for individuals with lower limb impairments,” expresses Dr. Androwis. “By facilitating more natural and intuitive walking patterns, we aspire to enable users of exoskeletons to move with increased ease and confidence.” With this groundbreaking advancement, the future of lower limb exoskeletons is poised to undergo a transformative shift, providing renewed hope and freedom to those who rely on them.
Conclusion:
The development of an advanced universal control system for lower limb exoskeletons using deep reinforcement learning represents a significant breakthrough in the market. This innovation addresses the limitations of current control methods, offering more robust and natural walking control, improved stability, and reduced user fatigue. By optimizing the user experience, this technology has the potential to enhance the quality of life for individuals with lower limb impairments. The market for lower limb exoskeletons is expected to witness substantial growth as this new system brings greater ease and confidence to exoskeleton users, opening up opportunities for improved mobility and independence.