
TL;DR:
- PIGINet, developed by MIT’s CSAIL, enhances the problem-solving capabilities of household robots.
- It employs machine learning to significantly reduce planning time by 50-80%.
- PIGINet eliminates task plans that cannot satisfy collision-free requirements.
- The system combines plans, images, and text to predict the feasibility of task plans.
- PIGINet achieves impressive reductions in planning time, even in complex scenarios.
- The use of multimodal embeddings and image data allows for a better representation and understanding of complex geometric relationships.
- By addressing the scarcity of training data, PIGINet demonstrates zero-shot generalization to unseen objects.
- PIGINet’s adaptable problem-solving approach enables household robots to navigate diverse environments efficiently.
Main AI News:
The age of advanced robotics has arrived, and with it comes the promise of seamless integration into our daily lives. Imagine a brand new household robot, eagerly awaiting your command to make you a steaming cup of coffee. While it possesses some basic skills from its training in simulated kitchens, the sheer number of potential actions it could take can be overwhelming. From turning on the faucet to emptying out the flour container, the possibilities seem endless. But in reality, only a select few actions are truly useful in this specific scenario. So, how can the robot discern which steps are sensible and navigate through uncharted territory?
Enter PIGINet, a groundbreaking system developed by researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). PIGINet leverages the power of machine learning to enhance the problem-solving capabilities of household robots, enabling them to operate more efficiently. Gone are the days of exhaustive, iterative task planning that considers every conceivable action. PIGINet revolutionizes the field by eliminating task plans that fail to meet collision-free requirements, effectively slashing planning time by an impressive 50-80 percent with a mere 300-500 problem training set.
Traditionally, robots would attempt various task plans, refining their moves through trial and error until a feasible solution was found. However, this approach proved to be time-consuming, especially when faced with obstacles that can move and articulate. Consider a scenario where, after cooking, you wish to store all the sauces in a cabinet. The number of steps required can vary greatly depending on the current state of the world. Does the robot need to open multiple cabinet doors? Are there any obstacles hindering the process? Naturally, you don’t want your robot to be agonizingly slow, and you certainly don’t want it to burn dinner while pondering its next move.
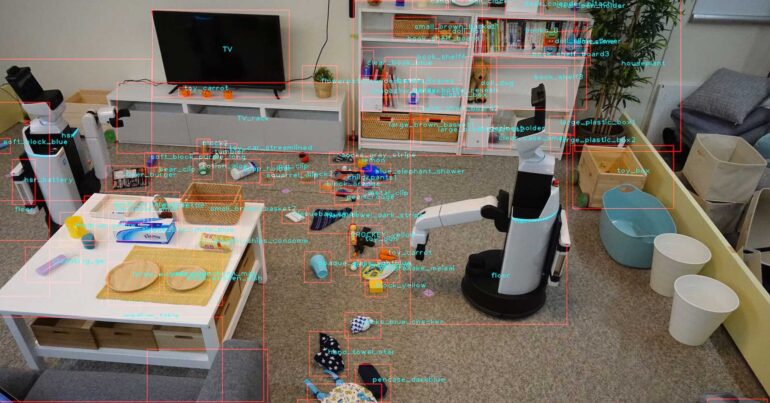
Conventionally, household robots have been limited to following predefined recipes for executing tasks, which often proves inadequate in diverse or changing environments. This is where PIGINet breaks the mold. PIGINet is a neural network that takes in “Plans, Images, Goals, and Initial facts” to predict the probability of refining a task plan and finding feasible motion plans. At its core lies a transformer encoder, a state-of-the-art model designed to process data sequences. In this case, the input sequence comprises information about the task plan under consideration, environmental images, and symbolic representations of the initial state and desired goal. By combining these elements, the encoder generates a prediction regarding the feasibility of the selected task plan.
To evaluate the effectiveness of PIGINet, the research team at MIT’s CSAIL focused on kitchen environments, creating hundreds of simulated scenarios with different layouts and specific tasks involving object rearrangement. By measuring the time required to solve these problems, they compared PIGINet against previous approaches. In simpler scenarios, PIGINet achieved an astounding 80 percent reduction in planning time, while in more complex scenarios with longer plan sequences and limited training data, it still managed a notable 20-50 percent reduction.
MIT Professor and CSAIL Principal Investigator Leslie Pack Kaelbling expresses her enthusiasm for PIGINet’s data-driven approach, saying, “Systems such as PIGINet, which leverage the power of data-driven methods to handle familiar cases efficiently while incorporating ‘first-principles’ planning methods to address novel problems, offer the best of both worlds. They provide reliable and efficient general-purpose solutions to a wide variety of problems.” Indeed, the synergy of traditional planning methods and data-driven insights propels PIGINet into a league of its own, empowering household robots to tackle a broad spectrum of challenges effectively.
One of the primary hurdles encountered during the development of PIGINet was the scarcity of high-quality training data. Generating feasible and infeasible plans through traditional planners is inherently slow. However, the research team cleverly addressed this obstacle by leveraging pretrained vision language models and employing data augmentation techniques. The results were impressive, showcasing not only significant reductions in planning time for problems involving known objects but also zero-shot generalization to previously unseen objects.
Zhutian Yang, MIT CSAIL PhD student and lead author of the work, emphasizes the need for adaptable problem-solving in robotics, stating, “Because everyone’s home is different, robots should be adaptable problem-solvers instead of just recipe followers. Our key idea is to let a general-purpose task planner generate candidate task plans and use a deep learning model to select the promising ones. The result is a more efficient, adaptable, and practical household robot capable of navigating even the most complex and dynamic environments. Furthermore, the practical applications of PIGINet extend far beyond households.“
Indeed, PIGINet’s groundbreaking use of multimodal embeddings in the input sequence allows for better representation and understanding of complex geometric relationships. By incorporating image data, the model gains insights into spatial arrangements and object configurations, eliminating the need for precise collision checking with 3D object meshes. This enables fast decision-making in diverse environments, adding a new level of versatility to household robotics.
The development of PIGINet was not without its challenges, but the MIT research team persisted and achieved remarkable results. Beomjoon Kim, assistant professor in the Graduate School of AI at Korea Advanced Institute of Science and Technology (KAIST), commends the work, stating, “This paper addresses the fundamental challenge in implementing a general-purpose robot: how to learn from past experience to speed up the decision-making process in unstructured environments filled with a large number of articulated and movable obstacles.” He further acknowledges PIGINet’s ability to eliminate infeasible task plans through learning, marking it as a promising step in the right direction.
Conclusion:
PIGINet represents a major breakthrough in the field of household robotics. By harnessing the power of machine learning, it revolutionizes planning efficiency and problem-solving capabilities. The significant reduction in planning time, along with its ability to handle complex scenarios and adapt to diverse environments, positions PIGINet as a game-changer in the market. This advancement opens up new possibilities for efficient, adaptable, and practical household robots, providing reliable solutions for a wide range of tasks. As PIGINet continues to evolve and refine, it has the potential to transform the way robots are trained, developed, and applied not only in homes but across various industries.