
TL;DR:
- HITL-TAMP combines Task and Motion Planning (TAMP) with human teleoperation for efficient robot skill training.
- It prompts human operators to engage at specific moments, optimizing data collection.
- Integration with an imitation learning framework enhances training efficiency and performance.
- In tests, HITL-TAMP outperformed traditional teleoperation, collecting more data and achieving a 75% success rate.
- This innovation paves the way for rapid and effective robotic skill acquisition.
Main AI News:
In the ever-evolving landscape of robotics, the quest to teach complex manipulation skills to machines has reached a pivotal juncture. While the power of human demonstration in training robots has shown remarkable promise, the arduous and time-consuming nature of this process presents a formidable challenge in scaling it up for real-world, long-term operations. The solution lies in the fusion of two cutting-edge technologies: Task and Motion Planning (TAMP) systems and human teleoperation.
A groundbreaking collaborative study conducted by NVIDIA and the Georgia Institute of Technology delves into the realm of enhancing TAMP systems, which have proven their mettle in resolving intricate problems with a multitude of potential outcomes. TAMP approaches excel in planning multi-step manipulation tasks, yet they traditionally rely on hand-engineered skills, which may fall short when dealing with complex maneuvers like closing a spring-loaded lid or inserting a rod into a hole efficiently.
Herein lies the innovation of HITL-TAMP, the Human-in-the-Loop Task and Motion Planning system—a game-changer in the field of robotics. This pioneering system seamlessly integrates TAMP and teleoperation, creating a symbiotic relationship that optimizes the strengths of both approaches. The heart of HITL-TAMP lies in its TAMP-gated control mechanism, which orchestrates the collection of demonstrations by seamlessly switching between automated planning and human teleoperation.
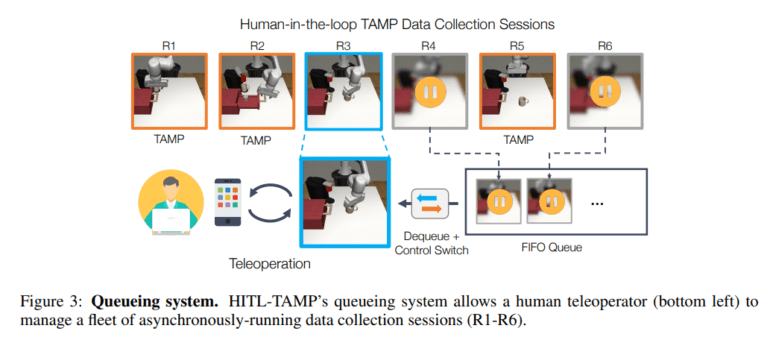
One of the key features of HITL-TAMP is its ability to prompt human operators to step in at precise moments within a workflow. This dynamic approach allows operators to efficiently manage a fleet of robots, engaging with one demonstration session at a time. The result? A substantial boost in data collection throughput, significantly reducing the effort required to gather vast datasets for intricate, contact-rich, and long-horizon tasks. It’s a paradigm shift that ensures human demonstrations are only requested when absolutely necessary.
The synergy between TAMP and teleoperation within HITL-TAMP extends further. The researchers have ingeniously integrated their data-gathering system with an imitation learning framework. This strategic move not only streamlines the training process but also enhances performance across various metrics. When compared to gathering complete human demonstrations for robot training, HITL-TAMP reigns supreme.
To validate the prowess of HITL-TAMP, the researchers conducted rigorous tests against a standard teleoperation system, involving 15 participants. The results were nothing short of astounding. Users could simultaneously acquire over three times as many demonstrations using HITL-TAMP, with just 10 minutes of data from non-expert teleoperation yielding agents with a remarkable 75% success rate. This breakthrough system excels, demonstrating its mettle across 12 contact-rich and long-horizon tasks, including real-world scenarios like coffee brewing.
Conclusion:
The advent of HITL-TAMP represents a significant advancement in the robotics market. Its ability to streamline data collection, boost training efficiency, and improve performance sets a new standard for robotic skill acquisition, offering immense potential for automation and efficiency across industries.