
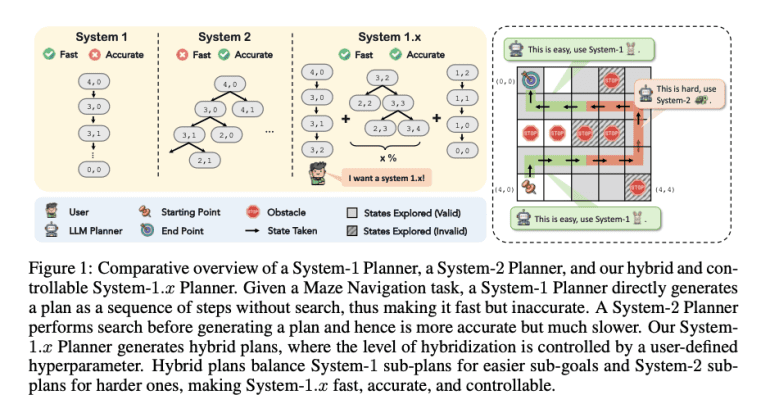
- The System-1.x Planner addresses the inefficiencies of traditional long-horizon planning methods by combining System-1 and System-2 approaches.
- System-1 planners offer fast, though less precise, solutions, while System-2 planners provide high accuracy at the cost of speed.
- The System-1.x Planner introduces a hybrid model with a controller that classifies sub-goals into easy or hard, allocating tasks to the appropriate planner type.
- The framework utilizes a single large language model fine-tuned for three components: the controller, System-1 planner, and System-2 planner.
- Training data is derived from classical tasks like Maze Navigation and Blocksworld, with key metrics focused on states explored and plan validity.
- Experimental results show the System-1.x Planner achieving 70.4% accuracy in Maze Navigation and outperforming existing planners, with up to 33% higher accuracy within a fixed state budget.
Main AI News:
In the realm of AI research, the challenge of optimizing language models for long-horizon planning remains significant. Traditional methods either compromise on real-time speed or precision for complex tasks. Addressing this issue is vital for advancing AI’s applications in dynamic environments such as robotics and navigation, where effective and adaptable planning is essential. The existing approaches to long-horizon planning generally fall into two categories: System-1 and System-2 planners. System-1 planners, characterized by their rapid plan generation, often lack the precision required for intricate tasks. Conversely, System-2 planners, known for their meticulous step-by-step approach, are computationally intensive and slow, making them unsuitable for real-time scenarios. These constraints lead to inefficiencies and suboptimal performance, particularly when user constraints and goals are not incorporated.
Researchers from UNC-Chapel Hill have introduced the System-1.x Planner, a novel hybrid framework designed to merge the advantages of both System-1 and System-2 planning modes. This innovative planner employs a controller to decompose planning problems into sub-goals, categorizing them as either easy or challenging. Easy sub-goals are addressed by the quick System-1 planners, while challenging ones are handled by the more precise System-2 planners. A user-defined hyperparameter regulates this hybridization, enabling the allocation of computational resources according to problem difficulty. This method offers a significant advancement by balancing speed and accuracy, providing a more efficient and adaptable solution compared to existing techniques.
The System-1.x Planner utilizes a single large language model (LLM) fine-tuned for three key components: the controller, the System-1 planner, and the System-2 planner. The controller’s function is to decompose the planning task and assign sub-goals based on their difficulty. Training data for these components is derived from search traces of classical planning tasks, such as Maze Navigation and Blocksworld. The Maze Navigation dataset comprises 3200 training, 400 validation, and 400 test examples, while the Blocksworld dataset includes 3000 training, 250 validation, and 200 test samples. Metrics include the number of states explored and plan validity, highlighting the model’s efficiency and precision across different planning contexts.
Empirical results underscore the System-1.x Planner’s effectiveness, demonstrating superior performance in Maze Navigation and Blocksworld tasks. In Maze Navigation, it achieved 70.4% accuracy with an average of 13.6 states, significantly surpassing both System-1 and System-2 planners. The System-1.x Planner also showed notable improvements in Blocksworld, managing more extended plans with greater efficiency. These findings emphasize the System-1.x Planner’s capability to balance speed and accuracy, offering up to 33% higher accuracy compared to other planners within a fixed state budget.
Conclusion:
The introduction of the System-1.x Planner represents a significant advancement in long-horizon planning by effectively merging the speed of System-1 planners with the precision of System-2 planners. This hybrid approach enhances efficiency and accuracy, making it highly relevant for real-time applications in dynamic fields such as robotics and navigation. For the market, this innovation could set a new standard in planning frameworks, potentially leading to increased adoption in complex, real-world environments where both speed and accuracy are critical.