
TL;DR:
- MIT researchers employ AI technique called “smoothing” to simplify contact-rich manipulation planning for robots.
- Smoothing condenses potential contact points, enabling efficient decision-making.
- This approach could lead to smaller, more versatile robots in manufacturing, reducing costs and energy consumption.
- The technique could also benefit space exploration, allowing robots to adapt quickly to new environments.
- Model-driven understanding of robotic systems accelerates decision-making processes.
- Combination of model and decision-search algorithm reduces computation times significantly.
- Results show promise in simulated and real-world scenarios involving various tasks.
- The technique involves reinforcement learning with smoothing for improved efficiency.
- Future improvements could address challenges with highly dynamic motions.
Main AI News:
The intricate art of manipulating objects with our bodies comes naturally to humans, yet poses a significant challenge for robots. The very act of grasping a substantial, weighty box and maneuvering it up a flight of stairs illustrates the complexity involved. Humans effortlessly employ their entire body to accomplish such tasks, while robots grapple with multifaceted issues. For robots, each potential point of contact between the box and their fingers, arms, or torso triggers a complex decision-making process. With countless plausible contact scenarios to consider, devising a feasible plan becomes an overwhelming endeavor.
However, a recent breakthrough from MIT researchers has illuminated a path toward tackling this intricate challenge known as contact-rich manipulation planning. The innovation hinges on an AI technique called “smoothing,” which condenses numerous contact possibilities into a more manageable set of decisions. This enables even a straightforward algorithm to swiftly identify an optimal manipulation strategy for robots.
Although still in its nascent stages, this technique has the potential to reshape the landscape of robotic manufacturing. By adopting the approach of utilizing entire arms or bodies to manipulate objects, smaller and more mobile robots could supplant the need for large, specialized robotic arms that rely solely on fingertip grasping. This paradigm shift could yield benefits like reduced energy consumption and lowered operational costs.
Furthermore, the impact isn’t confined to factory floors. Imagine robots dispatched for exploratory missions to distant planets, such as Mars. Armed solely with onboard computing power, these robots could swiftly adapt to unfamiliar terrains using the same technique. This prospect opens up a new realm of possibilities for space exploration and extraterrestrial research.
H.J. Terry Suh, co-lead author of the pioneering research, emphasizes the significance of leveraging robotic system structures. He envisions the acceleration of decision-making processes and the emergence of contact-rich plans by capitalizing on a model-driven understanding of these intricate systems.
Suh collaborates with Tao Pang PhD ’23, a roboticist at Boston Dynamics AI Institute, Lujie Yang, an EECS graduate student, and Russ Tedrake, a senior author and renowned expert in various engineering disciplines. Their collective efforts culminate in a seminal contribution, recently published in IEEE Transactions on Robotics.
This breakthrough hinges on “reinforcement learning,” a machine-learning approach wherein robots learn to accomplish tasks through iterative experimentation, aiming for rewards that draw them closer to predefined goals. While effective for contact-rich manipulation planning, this technique demands extensive computational resources due to the sheer volume of potential contact points.
Intriguingly, the MIT team discovered that the effectiveness of reinforcement learning owes much to the technique of smoothing. Smoothing involves distilling a plethora of potential decisions into a handful of critical ones. It effectively filters out inconsequential micro-adjustments that robots might make when interacting with objects. By averaging out these trivial decisions, smoothing allows robots to concentrate on the significant interactions that truly matter.
Drawing inspiration from this insight, the researchers designed a simplified model. This model seamlessly integrates smoothing principles, enabling it to forecast core robot-object interactions and predict long-term behavior. Remarkably, this model achieves comparable complexity to reinforcement learning in generating intricate plans, all while offering a more streamlined and efficient approach.
However, simplification brings its own set of challenges. The researchers addressed this hurdle by combining their model with a swift decision-search algorithm. This synergy dramatically reduced computation times, making complex planning feasible within a mere minute, even on a standard laptop.
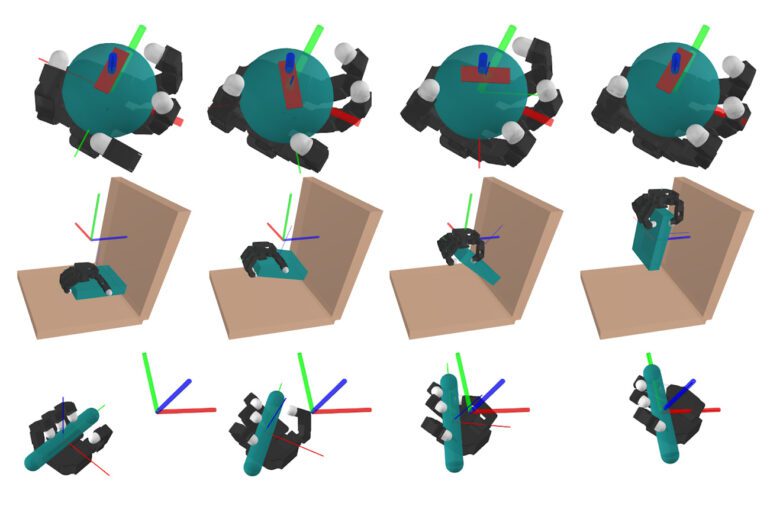
In simulated scenarios, involving tasks ranging from positioning a pen to opening doors, their model-based approach rivaled the performance of reinforcement learning, achieving comparable results in a fraction of the time. Real-world experiments with actual robotic arms yielded similarly promising outcomes.
Russ Tedrake, a prominent figure in the field, commended the novel approach as a game-changer. He highlighted that the same principles extending to whole-body manipulation could also revolutionize tasks involving dexterous human-like hands. The team’s innovative fusion of randomized smoothing with traditional planning methods offers a glimpse into a future where robotics can navigate intricate tasks efficiently.
Despite these advancements, the model does have limitations. It’s optimized for gradual, controlled motions and struggles with highly dynamic scenarios like object freefall. The researchers, undeterred, envision enhancing the model to encompass these challenges and enable robots to tackle even the most dynamic of tasks.
In the end, this study underscores the potential of informed design in conjunction with AI techniques. It demonstrates how, by understanding the unique intricacies of a problem, researchers can create more efficient algorithms and solutions. As H.J. Terry Suh aptly puts it, venturing beyond the confines of a “black box” approach can yield significant rewards.
Conclusion:
The breakthrough in contact-rich manipulation planning through the application of AI techniques like smoothing promises transformative changes in robotics. Smaller, more adaptable robots in manufacturing and the potential for efficient space exploration are on the horizon. The fusion of model-driven insights with rapid decision-making algorithms marks a significant leap in efficiency. This shift could shape a new landscape in the robotics market, offering more cost-effective and versatile solutions that cater to a range of industries.