
TL;DR:
- Researchers from Princeton and Stanford utilize large language models (LLMs) to personalize tidying up tasks for home robots.
- LLMs summarize user preferences based on minimal inputs, guiding the robot’s actions.
- The approach achieves high adaptability and accuracy, as demonstrated by TidyBot in real-world scenarios.
- LLMs have the potential to enhance robotic systems and inspire further research in robotics applications.
- Future advancements could lead to advanced home robots that align with user preferences, improving chore completion.
- Limitations exist in the current implementation but can be addressed with advanced primitives and planning techniques.
Main AI News:
Customizing household chores to suit individual preferences has always been a challenge. However, recent advancements in large language models (LLMs) have paved the way for robots that can adapt to user needs. Researchers from Princeton University and Stanford University have taken a significant step forward in this direction, presenting a groundbreaking approach in a paper pre-published on arXiv. Their focus was on leveraging LLMs, such as ChatGPT, to enhance the capabilities of home robots, with a particular emphasis on tidying up indoor environments.
“To effectively personalize physical assistance, a robot must learn user preferences that can be broadly applied,” explained Jimmy Wu, Rika Antonova, and their colleagues in their research paper. “In our work, we explore the personalization of household cleanup by robots capable of picking up objects and organizing rooms.”
The researchers harnessed the powerful summarization capabilities of LLMs, which enable these models to extract crucial information and provide generalized guidelines based on minimal user inputs. By training an LLM on a small dataset of textual preferences offered by users, they created “summaries” of users’ tidying preferences. For instance, a user might input instructions like “Place red colored clothes in the drawer and white ones in the closet.” The LLM then formulates generalized preferences that can guide a robot’s actions.
Determining the ideal location for each object proves to be a key challenge, as preferences vary significantly based on personal taste and cultural background. “While one person may prefer storing shirts in a drawer, another may opt for the shelf. Our objective is to develop systems that can learn such preferences through limited examples and prior interactions with individuals,” elaborated Wu, Antonova, and their colleagues.
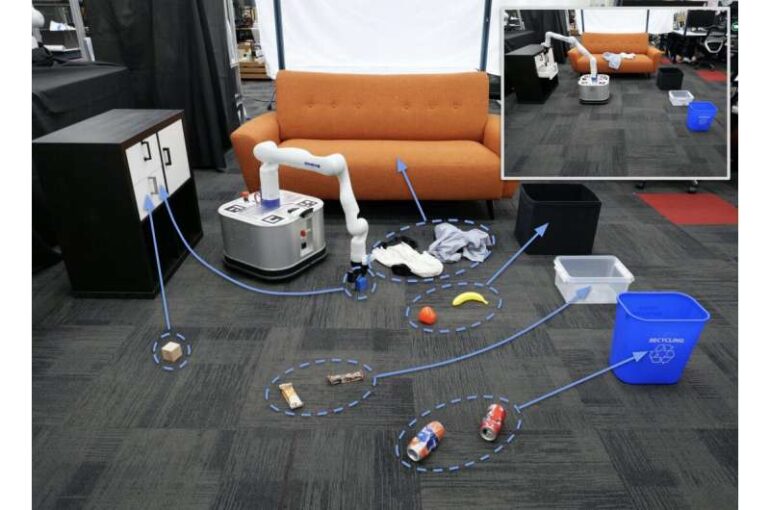
To evaluate their approach, the researchers conducted tests that assessed both the generalized preferences generated by the LLM when given textual data and the impact on a real robot’s ability to tidy up in personalized ways. They employed TidyBot, a robot specifically designed to clean floors while identifying random objects in its surroundings and placing them in designated spots.
“The adaptability of our approach achieved an impressive 91.2% accuracy when confronted with unseen objects in our benchmark dataset,” revealed Wu, Antonova, and their colleagues. “Moreover, we successfully implemented our approach on TidyBot, a real-world mobile manipulator, which proficiently put away 85.0% of objects in real-world test scenarios.”
This recent breakthrough showcases the immense potential of LLMs beyond aiding users with written tasks or answering queries. They can also revolutionize the capabilities of robotic systems. In the future, this research could inspire other teams to explore the possibilities of LLMs in the realm of robotics.
The LLM-based approach proposed by the researchers, coupled with the development of TidyBot, may soon contribute to the creation of advanced home robots capable of completing chores and tidying up environments in line with users’ preferences. Future studies could further refine and enhance this method, potentially enabling it to excel even in highly cluttered spaces.
“We acknowledge that our current real-world system has certain limitations, such as the use of hand-written manipulation commands, top-down grasping, and assumed knowledge of receptacle locations,” acknowledged the researchers. “Addressing these limitations could involve incorporating more advanced primitives and expanding the perception system’s capabilities. Furthermore, as mobile robots cannot traverse obstacles, the system’s performance might be affected in excessively cluttered environments. It would be intriguing to integrate more sophisticated high-level planning, allowing the robot to reason whether it should clear a path before picking up the closest object.“
Conclusion:
The integration of large language models in personalized tidying up has significant implications for the market. Home robots that can adapt to user preferences and efficiently complete household chores offer improved convenience and satisfaction for users. The research highlights the potential of LLMs in enhancing robotic systems, paving the way for further exploration and innovation in the field of robotics. As advancements continue, we can expect to see increasingly advanced home robots that cater to individual needs, revolutionizing the market and transforming the way we approach household tasks.