
TL;DR:
- Quatro++ is a groundbreaking global registration framework for LiDAR SLAM.
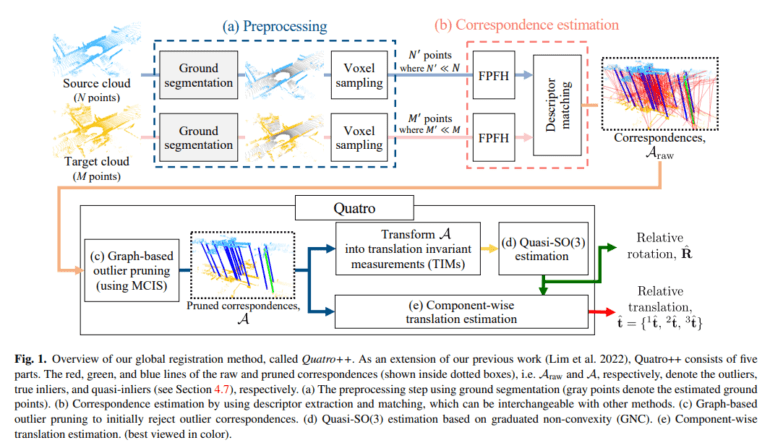
- It addresses sparsity and degeneracy challenges by incorporating ground segmentation.
- Achieves higher success rates, improved loop closing accuracy and efficiency.
- Enhances loop constraint quality, resulting in more precise mapping.
- Outperforms traditional learning-based approaches.
- Demonstrates adaptability in INS systems, compensating for roll and pitch angles.
- Versatile and applicable across diverse datasets and LiDAR sensor configurations.
Main AI News:
In the ever-evolving realm of LiDAR-based Simultaneous Localization and Mapping (SLAM), a breakthrough innovation has emerged from the labs of KAIST. Researchers at the prestigious institution have introduced Quatro++, a formidable global registration framework designed to combat the persistent challenges of sparsity and degeneracy in LiDAR SLAM. This cutting-edge methodology not only triumphs over previous success rates but also elevates the precision and efficiency of loop closing through the ingenious use of ground segmentation.
The Significance of Quatro++ in LiDAR SLAM
Quatro++ is not just another addition to the crowded field of SLAM solutions; it is a game-changer. This innovative framework has raised the bar for loop closing performance, delivering higher quality loop constraints and more accurate mapping results compared to traditional learning-based approaches. But what sets Quatro++ apart from the competition?
Global Registration and Loop Closing
The heart of Quatro++’s success lies in its ability to effectively close loops, enhance loop constraints, and produce superior maps. While many LiDAR-based SLAM methods prioritize odometry or loop detection, Quatro++ recognizes the paramount importance of loop closing in refining loop constraints, an aspect that has been largely overlooked in the field.
Overcoming Challenges with Ground Segmentation
To tackle the formidable challenges of sparsity and degeneracy faced by global registration methods in LiDAR SLAM, Quatro++ introduces a robust framework that incorporates ground segmentation. This innovative approach not only enhances registration but also proves particularly effective for ground vehicles.
Quatro++’s Key Features
One of Quatro++’s standout features is its use of quasi-SO estimation in conjunction with ground segmentation. Experimental results on the KITTI dataset have showcased Quatro++’s remarkable ability to improve translation and rotation accuracy significantly during loop closing. Moreover, it has demonstrated its adaptability in Inertial Navigation Systems (INS) by compensating for roll and pitch angles, further underlining its versatility.
Exceptional Success and Versatility
Quatro++ has left an indelible mark on the world of LiDAR SLAM by achieving remarkable success rates while addressing the sparsity and degeneracy issues. Its ground segmentation has been a game-changer for ground vehicle registration, resulting in enhanced mapping precision and improved loop constraint quality. Notably, Quatro++ has outperformed conventional methods like RANSAC, FGR, and TEASER across diverse datasets and LiDAR sensor configurations. Its proven feasibility in INS systems, with its ability to compensate for roll and pitch angles, showcases its adaptability across various scenarios.
Conclusion:
Quatro++ is not just a solution; it is a paradigm shift in the domain of LiDAR-based SLAM. Its innovative approach to global registration, emphasis on loop closing, and utilization of ground segmentation have propelled it to the forefront of the industry. As the research community and industry continue to harness its capabilities, Quatro++ is poised to redefine the standards of excellence in LiDAR SLAM.