
TL;DR:
- RoboTool, a collaboration between Carnegie Mellon University and Google DeepMind, utilizes Large Language Models (LLMs) for advanced robotic capabilities.
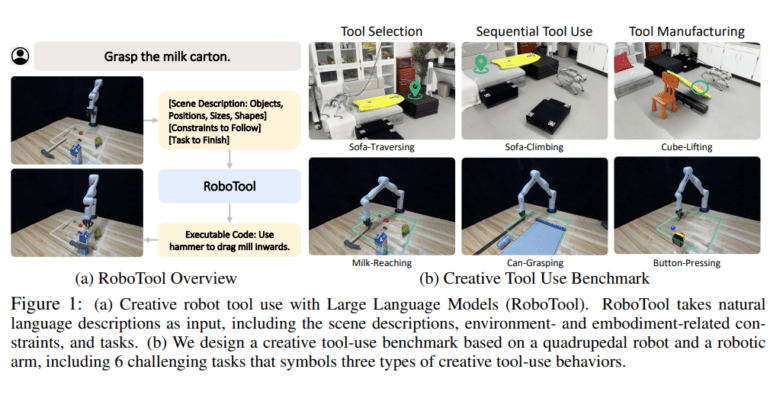
- It comprises four key components: a Natural Language Interpreter, a Strategic Planner, a Parameter Calculator, and a Code Generator.
- Powered by GPT-4, RoboTool offers flexibility, efficiency, and user-friendliness compared to traditional methods.
- It addresses the challenge of creative tool use in robots, enhancing their adaptability.
- LLMs play a crucial role in encoding knowledge for complex robotics tasks.
- RoboTool introduces a benchmark for evaluating creative tool-use capabilities and excels in both simulated and real-world environments.
- Evaluation includes measuring Tool-Use Error, Logical Error, and Numerical Error.
- The absence of certain components within RoboTool highlights their significance.
- RoboTool demonstrates impressive real-world creative tool-use behaviors, despite some perceptual and execution challenges.
Main AI News:
In a groundbreaking collaboration between Carnegie Mellon University and Google DeepMind, a cutting-edge AI system known as RoboTool has emerged as a game-changer in the world of robotics. RoboTool, powered by the advanced capabilities of Large Language Models (LLMs), is set to redefine how robots interact with their environment, navigate complex tasks, and unleash their creative potential.
The Four Pillars of RoboTool’s Power
RoboTool is built upon four core components, each contributing to its remarkable capabilities:
- Natural Language Interpreter: This component allows RoboTool to understand and interpret natural language instructions, enabling seamless communication between humans and robots.
- Strategic Planner: RoboTool possesses a sophisticated planner that generates strategic approaches to tackle complex tasks. It empowers robots with the ability to think ahead and plan for the long term.
- Parameter Calculator: The calculator within RoboTool computes essential parameters required for task execution. It ensures precision and accuracy in every action the robot takes.
- Code Generator: To bring plans to life, RoboTool utilizes a code generator that translates strategies into executable Python code. This bridge between language and action enables robots to perform tasks with efficiency and reliability.
GPT-4: The Driving Force Behind RoboTool
At the heart of RoboTool lies GPT-4, the latest iteration of the renowned Large Language Model. This powerful AI engine equips RoboTool with unprecedented flexibility, efficiency, and user-friendliness, setting it apart from traditional Task and Motion Planning methods.
Unlocking Creative Tool Use in Robots
The study conducted by this dynamic research duo addresses a crucial challenge in robotics—inspiring robots to exhibit creativity in tool usage. Much like animals display intelligence in their use of tools, RoboTool emphasizes the importance of robots not merely adhering to predefined tool functions but also exploring unconventional, creative applications. Traditional Task and Motion Planning methods often stumble when dealing with implicit constraints, proving computationally intensive.
Large Language Models (LLMs) to the Rescue
Enter Large Language Models (LLMs), which have shown immense promise in encoding knowledge that proves invaluable for robotics. These models pave the way for RoboTool’s capacity to handle tasks involving implicit constraints with ease.
A Benchmark for Creativity
RoboTool introduces a groundbreaking benchmark for evaluating creative tool-use capabilities, encompassing tool selection, sequential tool utilization, and even tool manufacturing. The system’s performance is rigorously tested in both simulated and real-world environments, revealing its prowess in solving intricate, long-term planning tasks characterized by implicit constraints.
Measuring Success: The Threefold Evaluation
The evaluation of RoboTool involves a meticulous assessment of three types of errors:
- Tool-Use Error: Determining whether the correct tool is employed.
- Logical Error: Focusing on planning inaccuracies, such as misorder tool usage or disregarding provided constraints.
- Numerical Error: Assessing calculations, including target positions and offsets.
Analyzing RoboTool’s Components
Interestingly, the study highlights the significance of each component within RoboTool. The absence of the analyzer results in a notable tool-use error, underscoring its pivotal role. Similarly, the calculator’s absence leads to a substantial numerical error, showcasing its importance within the model’s framework.
RoboTool’s Remarkable Feats
The study illustrates RoboTool’s achievements across various tasks, including navigating gaps between sofas, reaching objects located beyond a robot’s workspace, and ingeniously employing tools beyond their conventional purposes. RoboTool harnesses the knowledge encoded within LLMs, encompassing object properties and human common sense, to decipher the intricacies of the 3D physical world.
Real-World Performance and Future Prospects
In experiments involving both robotic arms and quadrupedal robots, RoboTool impresses with its creative tool-use behaviors, including improvisation, sequential tool utilization, and even tool manufacturing. While its simulation performance rivals or surpasses baseline methods, its real-world effectiveness is slightly affected by perception and execution errors.
Conclusion:
RoboTool’s integration of LLMs and AI-powered creativity into robotics signifies a significant step forward in the market. It offers a more adaptable and efficient solution for complex tasks, particularly those involving implicit constraints. This innovation has the potential to reshape industries that rely on robotics, from manufacturing to healthcare, by unlocking new levels of automation and problem-solving.