
TL;DR:
- ETH Zurich’s research introduces a three-step process for robots to autonomously perform tasks like opening doors and operating dishwashers.
- The system requires minimal manual guidance, allowing robots to mimic activities without constant human intervention.
- The process involves scene and action description, route planning, and route refinement.
- The system comprehensively determines robot movement, forces, appendage usage, and contact points with objects.
- Categorized into object-centric and robot-centric tasks, the approach demonstrates adaptability to diverse form factors.
- Initial tests are executed on ANYbotics’ quadruped model, ANYmal, showcasing its versatility.
- The research serves as a stepping stone toward developing fully autonomous loco-manipulation pipelines.
Main AI News:
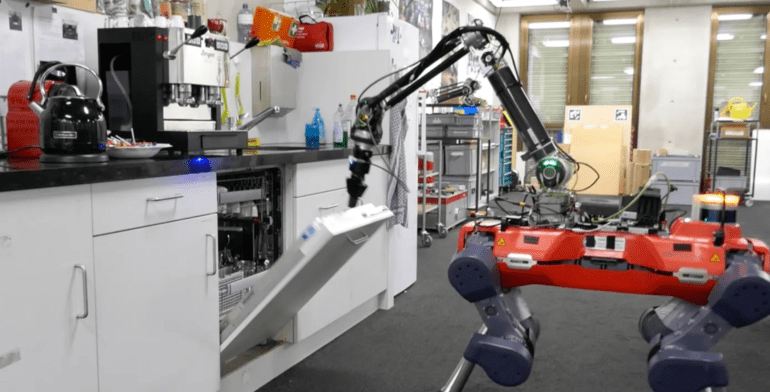
In recent years, captivating videos showcasing robots skillfully navigating the art of opening doors and operating dishwashers have inundated social media. These scenes, however, often hide the truth that substantial human assistance lies behind these impressive feats. Whether through real-time remote control or guided training sessions, the robots’ prowess has been augmented by human guidance, revealing a less glamorous reality.
A groundbreaking study conducted at ETH Zurich sheds light on a novel paradigm that curtails the need for extensive human intervention. This innovative approach revolves around a concise three-step protocol. First, the user elucidates the scenario and the intended action. Subsequently, the system devises a somewhat intricate course of action. Lastly, the system fine-tunes the route, refining it into an optimal path that demands minimal intervention.
The research paper elaborates, “By furnishing the system with high-level descriptions of both the robot and the object, and by encoding task specifications using a sparse objective, our planning mechanism comprehensively deciphers various aspects: the robot’s kinematics, the required exertion of forces, the selection of appendages, as well as the precise moments and positions for establishing or severing contact with the object.”
The system is categorized into two core domains: object-centric and robot-centric. The former pertains to tasks like initiating doors or engaging dishwashers, whereas the latter pertains to maneuvering the robot amidst various obstacles and objects.
This remarkable innovation is adaptable to a plethora of physical configurations. However, for the sake of clarity and ease, the initial demonstrations were conducted using a quadruped model—specifically the ANYmal, an achievement of the ETH Zurich spin-off, ANYbotics. This company has emerged as a prominent player in the realm of research projects that amplify the capabilities of autonomous systems.
The research team underscores the potential of this development as a stepping stone towards achieving a “fully autonomous loco-manipulation pipeline.” With this advancement, the prospect of systems that proficiently open doors without any reliance on human intervention draws tantalizingly close. As the field of robotics continues to push its boundaries, this leap forward exemplifies the inexorable march toward a future where machines master domestic chores with impeccable autonomy.
Source: ETH Zurich
Conclusion:
This groundbreaking research from ETH Zurich ushers in a new era of robot autonomy, where complex domestic tasks are executed with minimal human intervention. The innovative three-step process, encompassing user input, route planning, and optimization, highlights a significant leap toward fully autonomous systems. This evolution has far-reaching implications for the market, paving the way for enhanced efficiency and productivity in industries ranging from household automation to logistics and beyond. As businesses harness the potential of such advancements, they position themselves at the forefront of the automation revolution, redefining operational paradigms and driving transformative market dynamics.