
TL;DR:
- Researchers from Shanghai Jiao Tong University and China University of Mining and Technology introduce TransLO, a groundbreaking LiDAR odometry network.
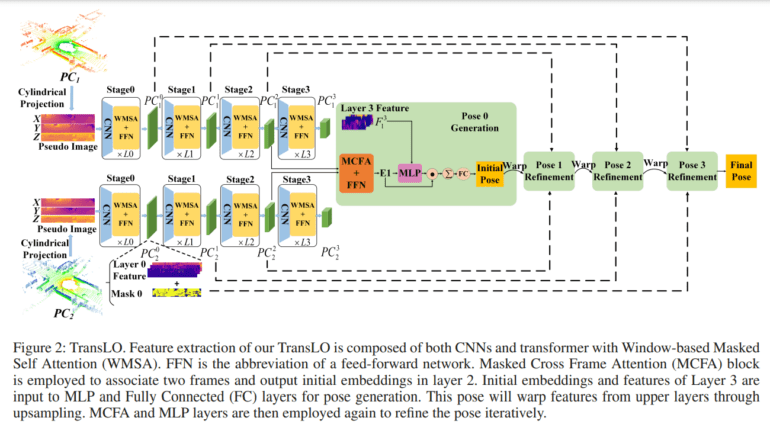
- TransLO combines convolutional neural networks (CNNs) and transformers to process point clouds efficiently, offering superior accuracy and global feature focus.
- Key components include window-based masked Self-attention (WMSA) for long-range dependencies and masked cross-frame attention (MCFA) for frame association and pose prediction.
- Ablation studies confirm the importance of WMSA and the binary mask for outlier filtering.
- TransLO outperforms existing methods on the KITTI odometry dataset with remarkable rotational and translational accuracy.
- Challenges include potential information loss due to the projection step and limited evaluation to the KITTI dataset.
Main AI News:
In a groundbreaking development, researchers hailing from Shanghai Jiao Tong University and China University of Mining and Technology have unveiled TransLO, a pioneering LiDAR odometry network that promises to reshape the landscape of large-scale LiDAR-based localization and navigation. TransLO, short for “Transformer-based LiDAR Odometry,” introduces an innovative approach that combines the power of Convolutional Neural Networks (CNNs) and transformers to create a robust and efficient framework for LiDAR odometry, addressing the limitations of traditional methods.
The Core Innovation
At the heart of TransLO lies a window-based masked point transformer equipped with self-attention and masked cross-frame attention mechanisms. This transformative approach adeptly handles sparse point clouds, overcoming the challenges faced by learning-based methods like CNNs in capturing long-range dependencies and global features within point cloud data.
Efficiency and Precision
TransLO’s efficiency is bolstered by its unique features, including a binary mask for eliminating invalid and dynamic points, a 2D projection-based processing of point clouds, and a local transformer that captures long-range dependencies. This framework employs stride-based sampling layers with Window-based Masked Self Attention (WMSA) for feature encoding, enhancing the receptive field of CNNs. Additionally, a projection-aware mask combats point cloud sparsity, while a pose-warping operation aids in iterative refinement.
Outperforming the Competition
A series of ablation studies have been conducted to validate the effectiveness of TransLO’s components, showcasing its superiority over existing methods, particularly on the challenging KITTI odometry dataset. TransLO achieved an average rotational Root Mean Square Error (RMSE) of 0.500°/100m and a translational RMSE of 0.993%, outperforming recent learning-based methods and even surpassing LOAM in most evaluation sequences.
Critical Components
The pivotal components that drive TransLO’s success include the Window-based Masked Self Attention (WMSA) for handling long-range dependencies, the binary mask for filtering outliers, and the Masked Cross Frame Attention (MCFA) module for establishing soft correspondences between frames, significantly improving translation and rotation accuracy.
Challenges and Future Directions
While TransLO marks a significant advancement in LiDAR odometry, there are challenges that warrant further exploration. The study acknowledges potential information loss due to the projection step and calls for a detailed analysis of the framework’s computational complexity. Furthermore, the evaluation is currently limited to the KITTI odometry dataset, prompting questions about its adaptability to diverse scenarios. Comparisons with non-transformer methods are notably absent, leaving room for a deeper understanding of TransLO’s strengths and weaknesses in relation to other techniques.
Conclusion:
The introduction of TransLO signifies a significant breakthrough in LiDAR odometry, with implications that extend to various business applications. This innovative framework’s ability to combine CNNs and transformers offers improved accuracy and efficiency, setting a new standard for large-scale localization and navigation. Businesses operating in fields such as autonomous driving, robotics, and mapping can anticipate enhanced performance and reliability in their LiDAR-based systems, ultimately driving progress and innovation in these industries.