
TL;DR:
- TRI unveils rapid robot skill acquisition method at TechCrunch Disrupt.
- Historically, robot learning involved millions of cases; now, dozens suffice.
- Fusion of traditional methods and diffusion models powers TRI’s system.
- Focus on skills adaptable to diverse environments for real-world applications.
- Tactile feedback enhances training, achieving high success rates in tasks.
- Diffusion policy enables overnight learning of new skills.
- Multiple teaching methods and fleet learning are the future.
- Large Behavior Models aim to scale skills, with ongoing research.
- This revolution heralds highly capable, adaptable robots for various industries.
Main AI News:
In the ever-evolving landscape of robotics, the pursuit of knowledge is a relentless journey. The rich history of this field spans decades, with the 1980s marking a pivotal era when remarkable strides were made in the domain of learning by demonstration. Research endeavors undertaken by esteemed institutions such as CMU, MIT, and UC Berkeley have collectively illuminated a path forward, one where robots acquire knowledge akin to their human counterparts.
At the Hardware Stage of TechCrunch Disrupt, the Toyota Research Institute (TRI) is unveiling groundbreaking strides in research, ushering in an era where robots can acquire new skills almost overnight. TRI’s CEO and Chief Scientist, Gill Pratt, expressed his astonishment at the swiftness of this methodology, highlighting the evolution of machine learning. Gone are the days when millions of training cases were a prerequisite; now, mere dozens, with a dash of diversity, suffice.
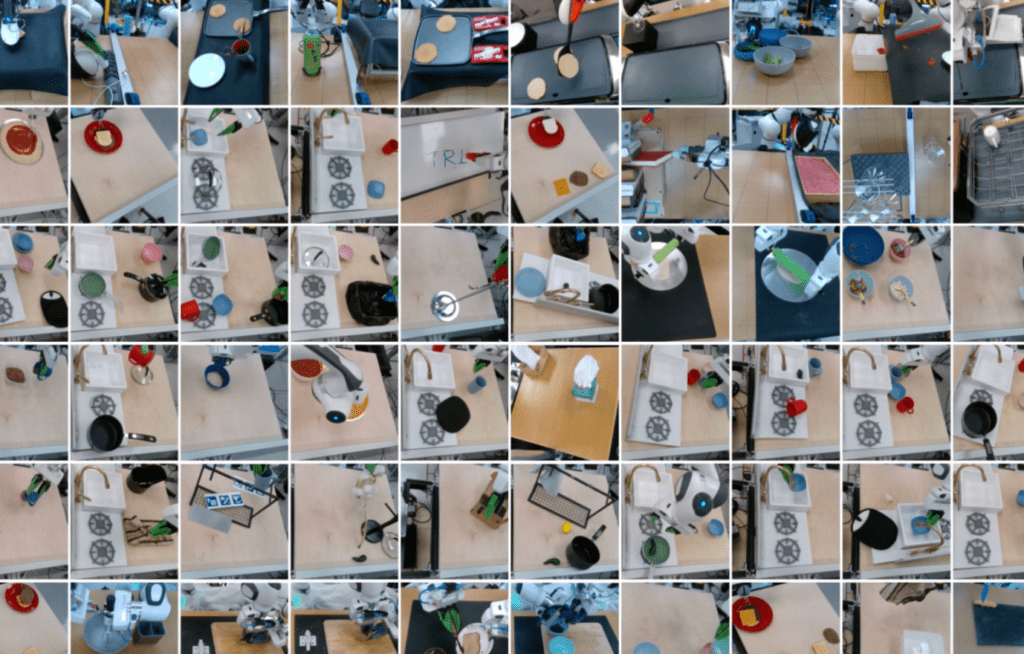
TRI’s innovative system amalgamates conventional robot learning techniques with diffusion models, reminiscent of the mechanisms propelling generative AI models such as Stable Diffusion. This dynamic approach has empowered TRI to train robots in a spectrum of 60 skills and counting. However, a critical point to note is that existing models alone cannot surmount this challenge.
Benjamin Burchfiel, Senior Research Scientist at TRI, emphasizes the monumental progress achieved with large language models. These models inject high-level cognitive intelligence into robots, enabling them to understand nuanced commands and perform tasks like picking up specific objects or executing actions in multiple languages. However, these models fall short when it comes to intricate tasks like plugging in a USB device or handling delicate items, leaving a crucial gap.
The essence of TRI’s method lies in its ability to program adaptable skills suitable for various settings. This adaptability is crucial as robots often grapple with unstructured environments. While navigating controlled spaces like warehouses is relatively straightforward, the real challenge emerges in homes, where furniture rearrangements and unpredictable settings test a robot’s capabilities.
Source: Toyota Research Institute
TRI’s primary mission extends beyond mere functionality. They are dedicated to developing systems that empower older individuals to live independently. In places with aging populations like Japan, this becomes increasingly pertinent. The aim is to create systems that seamlessly transition between different environments, accommodating changes gracefully.
Traditionally, roboticists adopted a brute-force approach, anticipating and programming robots to handle every possible deviation and edge case. While effective, this approach is limited. TRI’s focus is on crafting “general-purpose” systems that can adapt and learn new tasks, a departure from the single-purpose systems that dominate today.
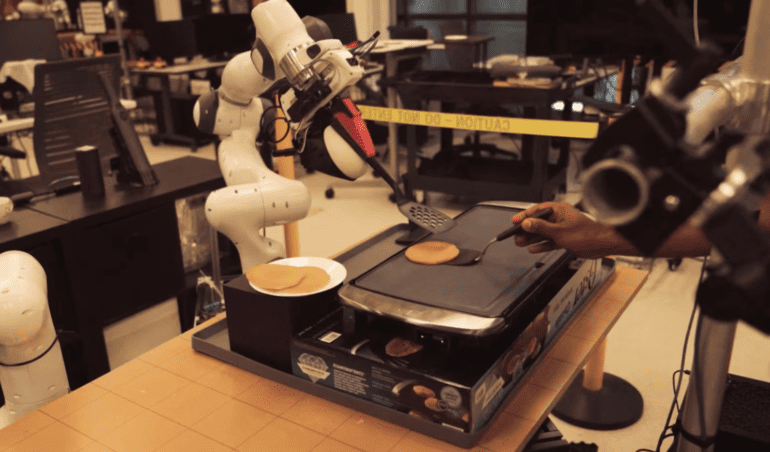
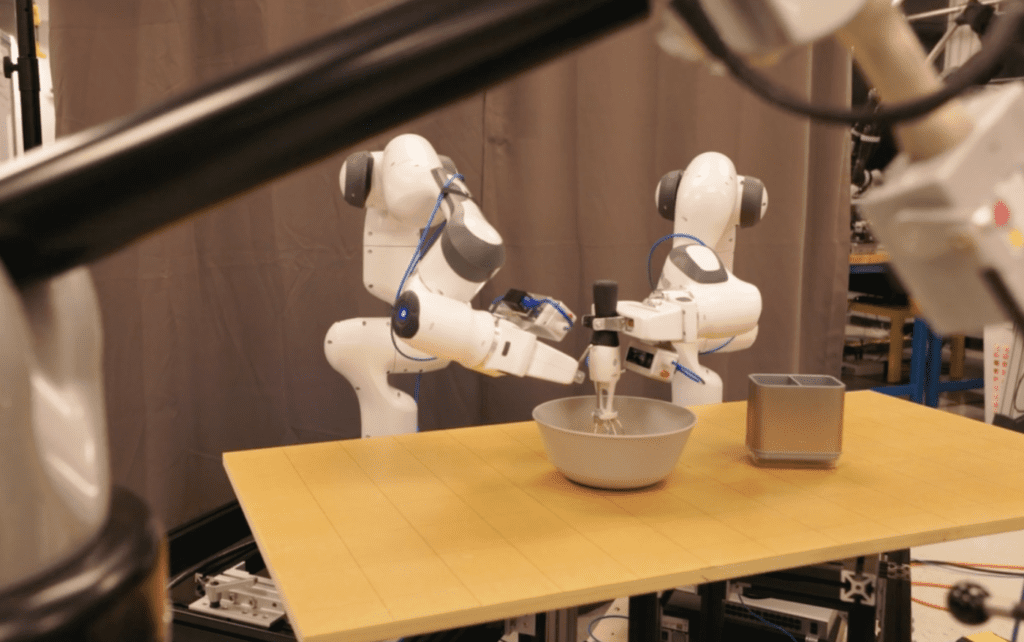
At TRI, the journey begins with teleoperation, a common tool in robot learning. This method involves remotely guiding robots through demonstrations, teaching them behaviors over repetitive cycles. The integration of tactile feedback, wherein the operator can feel the robot’s interactions with the world, has unlocked new possibilities in training dexterity.
The system meticulously processes data from various sensors, combining sight and force feedback to create a holistic understanding of tasks. Force feedback is particularly instrumental in tasks like correctly holding tools. TRI reports promising results with tactile feedback, exemplified by a 90% success rate in tasks like flipping pancakes, dough rolling (96%), and food serving (90%).
Source: Toyota Research Institute
Once the initial training phase concludes, the neural networks take over, working diligently overnight to master the skill. This process hinges on diffusion policy, a method that extracts meaning from randomized images by eliminating noise. It aligns with the principles of generative AI, but its application lies in shaping robot behaviors.
A revelation in my contemplation of robotic learning is the realization that multiple methods can coexist harmoniously, just as humans embrace diverse learning techniques. Furthermore, fleet learning, a centralized cloud-based system, holds immense promise as robots collaborate, sharing and amplifying their collective knowledge.
A pivotal future step involves the development of Large Behavior Models, scaling up the number of skills robots can learn. As Vice President of Robotics Research, Russ Tedrake, notes, TRI is on a quest to expand its repertoire to hundreds and even thousands of skills. This exploration is unearthing the scaling laws that govern this endeavor, shedding light on the timeline ahead.
In the long run, these findings will pave the way for highly capable robots, adept at handling novel situations and crafting actions on the fly based on their trained behaviors. While we journey toward this future, TRI’s CEO, Gill Pratt, and Boston Dynamics AI Institute Executive Director, Marc Raibert, will convene to delve into these breakthroughs and their implications at Disrupt’s Hardware Stage on Thursday. The quest for knowledge in the world of robotics continues to shape the future of technology and human-robot collaboration.
Conclusion:
TRI’s breakthrough in accelerated robot learning not only reduces the training data requirements but also enables adaptability in diverse environments. The combination of tactile feedback, neural network training, and the quest for large-scale behavior models sets the stage for highly capable robots that can quickly adapt to new tasks. This development has the potential to revolutionize industries reliant on robotics, opening doors to more agile and versatile automation solutions.