
TL;DR:
- Stick insects provide a unique paradigm for studying locomotion in both biology and robotics.
- Researchers have deciphered the movement mechanisms of stick insects and translated them into a self-organized limb movement system for robots.
- The system employs simple feedback loops to coordinate movement across the limbs, resulting in organic and adaptive locomotion.
- This approach has potential applications in search and rescue machines, delivery robots, and exoskeletons for assisting injured individuals.
- The researchers’ work extends beyond stick insects, encompassing the replication of movement in dung beetles and millipedes as well.
- The self-organized movement can be applied to various robot setups, including those with symmetrical layouts.
Main AI News:
The field of robotics has always strived to replicate the diverse locomotion capabilities observed in the animal kingdom, encompassing crawling, walking, swimming, and even flying. However, achieving such modes of movement in robots is an intricate challenge. Teaching robots to walk, for instance, demands substantial computing power and prolonged simulated trial and error using machine learning techniques. Researchers are now shifting their focus towards nature, seeking inspiration from how young animals effortlessly learn to move, in order to develop robots with simpler control systems capable of achieving forward motion.
Among the myriad of creatures that exhibit intriguing locomotion, stick insects hold a particular fascination due to their unique body shape and asymmetric legs. These characteristics offer unexplored possibilities for both biological mechanics and the replication of movement in robots. A recent study has successfully unraveled the secrets of stick insect motion, closely analyzing joint and limb movements. The findings of this study have paved the way for a novel system of self-organized limb movement in robots, relying on simple feedback loops to steer individual oscillating joints.
Robotic machines constructed using this innovative approach possess the potential to revolutionize various domains, such as search and rescue operations, delivery services, and even the development of exoskeletons for assisting individuals with mobility impairments. By drawing inspiration from the insect world, which has finely tuned its movement strategies over millennia, Professor Poramate Manoonpong and his team at the University of Southern Denmark, in collaboration with researchers from Kiel University in Germany, have developed functional robots that push the boundaries of applied robotics while expanding our fundamental understanding of biomechanics in the animal kingdom.
Their most recent breakthrough, documented in the prestigious journal Advanced Theory and Simulations, centers on the study of stick insects and their remarkable locomotion. According to Professor Manoonpong, there were two key questions the team sought to address. Firstly, they wanted to explore how animals with different body geometries handle complex locomotion—an area that remains largely unexplored. While most robots feature symmetrical layouts, the researchers hypothesized that asymmetry might offer additional benefits. Stick insects, for instance, can navigate large gaps due to the extended reach of their long forelegs.
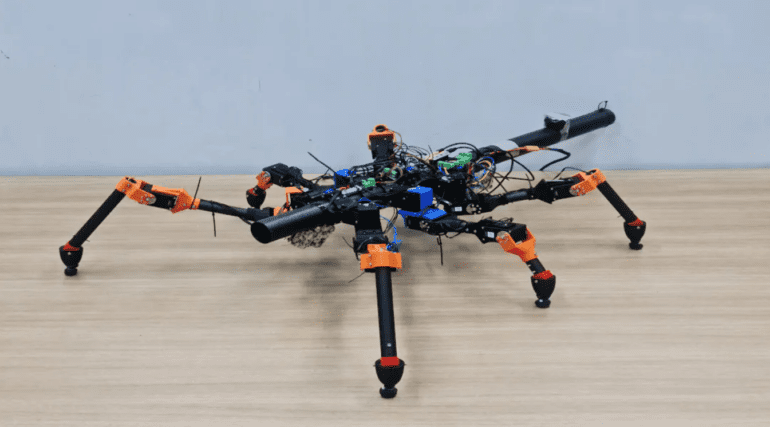
To tackle these questions, the researchers meticulously analyzed the movement patterns of stick insects with heterogeneous leg lengths, capturing their foot movement profiles. Subsequently, they translated these intricate trajectories into a biorobotic model. Each leg of the robot, equipped with three joints, displays a distinct pattern of rhythmic oscillation. By integrating this motion profile into the robotic simulation, the researchers established an elegantly simple yet versatile system for coordinating movement across all limbs.
The movement of the robots is orchestrated through a straightforward principle: each foot contact provides feedback to its respective oscillator. This feedback loop prompts the oscillator to adjust its speed, allowing the foot to lift or stay in place. This mechanism operates independently within each of the robot’s six limbs, fostering self-organization of movement without necessitating a central connection between the appendages. The foot contact information serves as the sole means of communication, allowing the limbs to synchronize their swing and stance motions.
Professor Manoonpong explains that the force distribution to the remaining limbs increases when the front leg attempts to lift, as it is connected to the central body. This information enables the necessary adjustments in the swing and stance movements of the legs. Initially, when the robot commences its motion, the legs oscillate in unison, resulting in all six feet remaining in contact with the ground without any forward movement. However, the organic movement gradually emerges as feedback from the foot contacts automatically fine-tunes the swing and stance motions of each leg.
This self-organized locomotion exemplifies the researchers’ approach, allowing the robot to determine its forward movement based on its own body dynamics rather than pre-programmed instructions. Consequently, the robot not only mimics stick insect motion with exceptional accuracy but also generates novel patterns of movement, demonstrating the versatility of this simple yet highly effective approach.
The beauty of this self-organized movement lies in its applicability to various robot configurations, including those with conventional symmetrical layouts. Its adaptability and low-intensity requirements make it suitable for a wide range of real-world applications. A robotic system capable of autonomously adapting its gait and functionality with simple control systems holds promise across multiple industries. Industries that require robots to navigate uneven or unpredictable terrains have expressed keen interest, as have those involved in search and rescue operations, agriculture, and package delivery.
The research team’s efforts to replicate the locomotion of dung beetles, another fascinating endeavor, have opened doors to innovative approaches in package movement. Looking ahead, Professor Manoonpong envisions their work making a profound impact on healthcare, with potential applications in assisting individuals with asymmetric gaits through the development of exoskeletons. By applying the neural control mechanisms derived from their comprehensive understanding of insect locomotion, the researchers aim to enable patients recovering from strokes or amputations to regain natural walking abilities.
Conclusion:
The exploration of stick insect movement and the development of self-organized limb movement in robots signify a significant advancement in the field of robotics. By learning from nature’s efficient and simple control systems, researchers have opened new avenues for improved search and rescue machines, delivery robots, and exoskeletons. This breakthrough has the potential to reshape the robotics market, catering to industries that require adaptable and versatile robots capable of navigating challenging terrains and aiding individuals in need. The fusion of biology-inspired robotics with practical applications holds promising prospects for the future.