
TL;DR:
- Cutting-edge 3D semantic instance segmentation is transforming various industries, such as robotics, augmented reality, and autonomous driving.
- Current systems struggle due to predefined item labels, limiting their ability to identify unfamiliar objects.
- Open-world learning emerges as a promising solution, allowing models to recognize the unknown without retraining.
- Pioneering research explores open-world 3D instance segmentation, providing an auto-labeling approach and probabilistic refinements.
- Comprehensive evaluation methodologies are introduced, closing the performance gap between their technique and an oracle.
Main AI News:
In the realm of 3D semantic instance segmentation, where precision reigns supreme, a remarkable evolution is underway. This avant-garde approach strives to unveil the identity of objects within a three-dimensional canvas, depicted through the intricate interplay of point clouds and meshes. It is a technological stride that holds immense promise for a plethora of vision-driven applications such as robotics, augmented reality, and autonomous driving. This paradigm shift owes its existence to the relentless pursuit of excellence in sensor technology, culminating in the emergence of expansive 3D datasets and breakthroughs in deep learning methodologies.
Nonetheless, the Achilles’ heel of 3D instance segmentation systems lies in their dependency on predefined item labels, commonly referred to as the vocabulary. The tangible world is awash with a multitude of object classes, and therein lies the challenge. Current techniques, constrained by a fixed set of labels, grapple with the unknown and the unseen, relegating them to the background label. This inherent limitation shackles intelligent algorithms, rendering them incapable of discerning unfamiliar or unconventional entities that defy categorization.
Enter the pioneering concept of open-world learning—a beacon of hope in the quest to identify the enigmatic. This novel approach seeks to equip models with the capacity to recognize the uncharted in an ever-evolving world. While hitherto applied mainly to 2D object recognition, the 3D domain has remained relatively uncharted territory. The intricate task of deciphering the appearance of objects in three-dimensional space, disentangling them from the backdrop and other object categories, poses a formidable challenge.
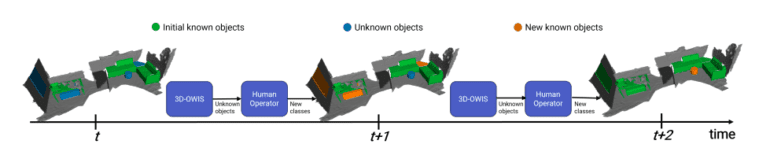
Figure 1’s 3D instance segmentation in an open environment offers a ray of hope, empowering models to discern uncharted objects and solicit annotations from an oracle for their subsequent training. However, this strategy grapples with its own set of challenges. Quality pseudo-labeling techniques become imperative in this context due to the dearth of annotations for unknown classes, the similarity between predicted features of known and unknown classes, and the imperative need for a dependable objectness scoring mechanism to distinguish between accurate and inaccurate predicted masks for 3D point clouds.
In a groundbreaking study, researchers hailing from Mohamed Bin Zayed University of Artificial Intelligence (MBZUAI), Aalto University, Australian National University, and Linköping University delve into the uncharted waters of open-world indoor 3D instance segmentation. Their mission is to segment objects of unknown classes while systematically assimilating new classes into the fold. They meticulously devise practical protocols and partitioning schemes to scrutinize the efficacy of 3D instance segmentation techniques in identifying uncharted objects. Much like the incremental learning paradigm, their proposed configuration appends unknown item labels to the roster of recognized classes. Additionally, they introduce a probabilistically refined mechanism for identifying unknown items, thereby augmenting object recognition. To their knowledge, they stand as trailblazers—the first to venture into the realm of 3D instance segmentation within an open-world framework.
The fruits of their labor yield the following monumental contributions:
• Introduction of the pioneering open-world 3D indoor instance segmentation approach, armed with a specialized mechanism for pinpointing 3D unknown entities with surgical precision. They employ an auto-labeling strategy to delineate between known and unknowable class labels, culminating in the generation of pseudo-labels during training. Furthermore, they elevate the quality of pseudo-labels during inference by adapting the likelihood of unknown classes based on objectness score distributions.
• Unveiling a comprehensive evaluation framework for open-world 3D indoor segmentation, characterized by meticulously curated open-world partitions. These partitions span the spectrum from known versus unknown classes, and they encapsulate the essence of incremental learning across a staggering 200 courses. The proposed partitions encompass diverse scenarios, including the innate distribution of object classes based on frequency, distinct class types discovered during spatial exploration, and the randomized distribution of object classes in the extrinsic world. A myriad of experiments conclusively underscores the efficacy of their solutions in bridging the performance gap between their technique and the ultimate oracle.
Conclusion:
The innovations in open-world 3D instance segmentation hold immense potential for businesses in industries reliant on accurate object recognition in 3D environments. This technology enables systems to adapt to novel objects without the need for extensive retraining, paving the way for more versatile and efficient applications in fields like robotics, augmented reality, and autonomous driving. Businesses should keep a close eye on these developments as they could lead to breakthroughs in product design, automation, and customer experiences.