
TL;DR:
- Researchers from Zhejiang University pioneered an efficient learning method to improve quadruped bounding.
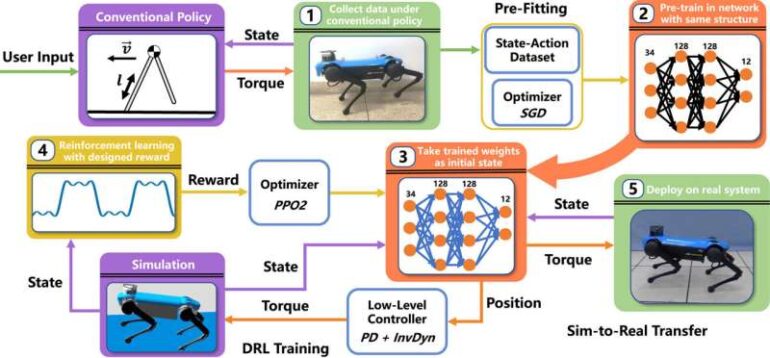
- Pre-training the neural network (NN) with conventional model-based controller data prevents behavior issues.
- Deep reinforcement learning (DRL) ensures robust bounding performance on the real quadruped robot, Jueying Mini.
- Integration of environmental perception tools can further enhance robot localization and navigation.
- Control moment gyroscopes (CMGs) elevate stability in high-speed operations for biped robots.
Main AI News:
In a groundbreaking study featured in the esteemed pages of the IET Cyber-Systems and Robotics journal, researchers hailing from Zhejiang University have embarked on a transformative journey to revolutionize legged robot motion and control. Their ingenious approach involves pre-training a neural network (NN) with data from a robot operated by conventional model-based controllers, strategically curbing behavior overriding and the formidable reward hacking phenomenon—a predicament where agents unexpectedly secure rewards, often due to optimization veering off-course to a local optimum rather than the intended destination.
Post pre-training, the formidable team seamlessly integrated deep reinforcement learning (DRL), a pioneering learning-based paradigm in legged locomotion control. Central to their triumph was the ingenious design of a reward function that factors in contact points and phases, diligently enforcing gait symmetry and periodicity, culminating in an unparalleled bounding performance. This meticulously crafted DRL method was meticulously honed in a simulated environment before being unleashed onto the real quadruped robot, the Jueying Mini.
The real-world trials were nothing short of awe-inspiring, transcending environments both indoors and outdoors with graceful ease, all while showcasing unwavering efficiency in computing and exceptional locomotion results. Notably, the control method developed for the Jueying Mini robot emerged as a stalwart, producing robust bounding gaits in both simulation and real-world scenarios. The implications of this triumph are vast, promising to elevate the agility and adaptability of quadruped robots across a diverse range of indoor and outdoor settings.
Excitingly, the researchers’ future endeavors entail harmoniously merging the current method with cutting-edge environmental perception tools, including the employment of cameras or LiDAR systems. While these groundbreaking tools weren’t utilized in the current study, their integration promises to bestow the robot with unparalleled accuracy in localization and navigation, a true game-changer when it comes to bounding across a myriad of terrains.
Biped Robots Reach New Heights of Stability with Control Moment Gyroscopes (CMGs)
In a captivating sequel to the special issue of the journal, another team of researchers is making significant strides by leveraging control moment gyroscopes (CMGs) to heighten the stability of biped robots, especially during high-speed operations. Biped robots, increasingly ubiquitous across industries, have grappled with balance and disturbance rejection as their pace accelerates.
Enter the newly devised CMG assistance strategy—a groundbreaking development that empowers these agile machines to defy impacts and swiftly regain balance, even in the face of daunting challenges. The simulation results resoundingly endorse the efficacy of CMGs in significantly enhancing robots’ stability, offering a profound leap forward in the realm of biped robotics. The researchers are steadfast in their commitment to further integrate CMGs, propelling biped robots to unparalleled real-world performance in high-dynamic motions.
Conclusion:
These groundbreaking advancements in robotics mark a significant leap forward in the market. The efficient learning method and deep reinforcement learning offer tremendous potential for enhancing the performance and adaptability of quadruped robots in diverse environments. Moreover, the integration of environmental perception tools promises to revolutionize robot navigation and localization. Additionally, the use of control moment gyroscopes represents a substantial improvement in the stability of biped robots, unlocking new possibilities for their applications across industries. These developments are poised to revolutionize the robotics market, driving innovation and propelling the industry into a new era of automation and efficiency.