
TL;DR:
- Researchers at Qingdao University of Technology introduce deep reinforcement learning algorithms for autonomous robot grasping and assembly.
- The algorithms, leveraging deep Q-learning and PPO, optimize grasping actions and reduce training time.
- Novel reward functions are developed to assess grasping and assembly capabilities comprehensively.
- Experiments demonstrate up to 90% success rates in both simulated and real-world environments.
- Future efforts aim to enhance accuracy, optimize strategy transfer, and minimize errors for broader applicability.
Main AI News:
In an era where semi-autonomous and fully autonomous robots are becoming increasingly prevalent across various real-world domains, particularly within industrial settings, the potential for optimizing manufacturing processes is immense. The integration of industrial robots holds the promise of accelerating production cycles by assisting human workers in mundane tasks and alleviating their burdensome workload.
Among the myriad challenges encountered in manufacturing, two stand out as particularly pivotal: object grasping and product assembly. However, achieving consistent success in these domains using robotic systems poses considerable difficulties. Notably, industrial robots traditionally require extensive programming to execute specific tasks, such as grasping and assembling particular items. This product-specific programming can prove time-consuming, hindering operational efficiency.
Addressing this critical limitation, researchers from Qingdao University of Technology have pioneered a groundbreaking solution harnessing deep reinforcement learning. Their seminal work, recently published in The International Journal of Advanced Manufacturing Technology, introduces novel deep learning algorithms poised to streamline the training process for industrial robots on grasping and assembly tasks.
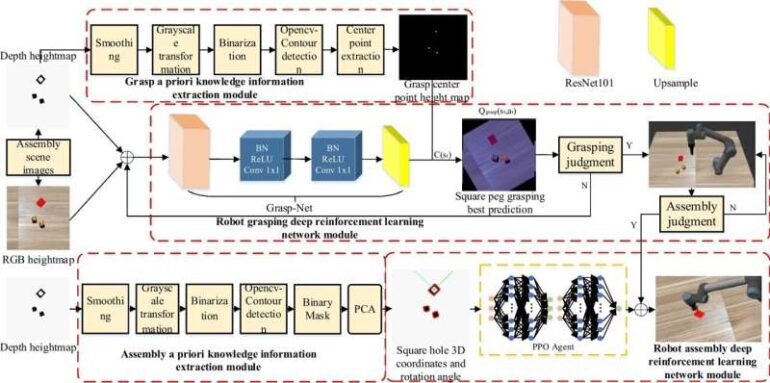
Chengjun Chen, Hao Zhang, and their team articulate their innovative approach in their paper, proposing a deep reinforcement learning-based framework for autonomous robot grasping and assembly skill acquisition. Central to their methodology are two key algorithms: a deep Q-learning-based model for grasping skill acquisition and a PPO-based algorithm for assembly skill acquisition. Notably, these algorithms leverage a priori knowledge to optimize grasping actions and minimize training time and data requirements for assembly strategy learning.
The advancements put forth in this research capitalize on recent strides in computer vision and machine learning. Specifically, the team has devised a deep learning algorithm tailored to expedite the acquisition of new object grasping skills by robots, alongside a complementary algorithm aimed at training robots for object assembly.
Furthermore, the researchers have developed sophisticated reward functions to effectively evaluate the grasping and assembly capabilities of industrial robotic systems. These functions encompass both grasping and assembly constraint reward mechanisms, ensuring comprehensive performance assessment.
To validate the efficacy of their proposed training framework, Chen, Zhang, and their collaborators conducted extensive experiments in both simulated and real-world environments. Utilizing the UR5 robotic arm—a lightweight yet robust apparatus commonly employed in industrial settings—in conjunction with a RealSense D435i camera for RGB image capture, the team evaluated their algorithms’ performance.
Their findings are highly encouraging, with an average grasping success rate of up to 90% in both simulated and real environments. Moreover, under a peg-in-hole assembly tolerance of 3 mm, the assembly success rates reached 86.7% and 73.3% in simulated and physical environments, respectively.
The initial outcomes underscore the immense potential of the proposed robot training toolkit in expediting industrial robot programming, facilitating rapid acquisition of reliable grasping and assembly capabilities. Moving forward, the researchers aim to refine their approach further and extend its applicability to diverse grasping and assembly tasks.
“In future endeavors, our focus will center on enhancing hole detection accuracy and domain randomization in virtual environments, optimizing strategy transfer from simulation to physical realms, and minimizing errors across both stages to bolster assembly success rates in real-world settings,” the researchers concluded, outlining their roadmap for continued innovation and advancement in robotic manufacturing.
Conclusion:
The introduction of deep reinforcement learning algorithms for autonomous grasping and assembly in industrial robotics represents a significant advancement. With the potential to streamline programming, expedite skill acquisition, and enhance operational efficiency, these innovations are poised to revolutionize the market, paving the way for more agile and adaptable manufacturing processes.